CONNECT:
🔗 LINKEDIN

Overview
Contributed to a U.S. Air Force–funded project on autonomous UAV navigation in GNSS-denied environments, supporting Personnel Recovery (PR) and Combat Search and Rescue (CSAR) missions. Focused on multi-UAV coordination and robust, high-accuracy localization in degraded environments. Integrated the AmiShare communication system for real-time encrypted peer-to-peer UAV communication
★ KEY ACHIEVEMENTS
★
Refined EKF for precise UAV localization in GNSS-denied, contested environments.
★
Programmed autonomous navigation for coordinated multi-UAV CSAR missions.
★
Integrated AmiShare communication system for real-time peer-to-peer UAV comms.
Tools:
EKF
UAV Autonomy
MAVROS
Ardupilot
ROS
AmiShare

Overview
Contributed to a National Geospatial-Intelligence Agency (NGA)–funded project on cooperative UGV–UAV exploration in subterranean environments. Integrated UAV localization within a UGV reference frame to enable precise mapping and navigation in GPS-denied tunnels and caves. Focused on FGO-based state estimation to deliver accurate UAV trajectories and support resilient multi-robot autonomy for underground search and rescue missions.
★ KEY ACHIEVEMENTS
★
Achieved 3D localization RMS error <0.6 m over UAV flight trajectories >20 m in subterranean trials.
★
Enabled coordinated UGV–UAV exploration for underground mapping in realistic tunnel environments.
★
Advanced autonomous multi-robot capabilities for GPS-denied search and rescue scenarios.
Tools:
FGO
Multi-Robot Localization
Subterranean SLAM
UAV/UGV Integration
GTSAM
ROS
Overview
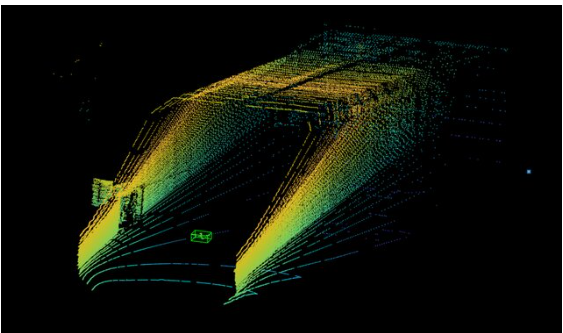
Masters thesis project developing a LiDAR-based UAV position estimation system using the PointPillars deep learning architecture for real-time 3D object detection. Created a custom dataset of 7,000+ annotated LiDAR scans and achieved a 30% improvement in localization accuracy over traditional point cloud clustering methods.
★ KEY ACHIEVEMENTS
★
Created dataset of 7,000+ annotated LiDAR scans for UAV detection model training.
★
Implemented PointPillars for real-time UAV detection and localization.
★
Achieved +30% improvement in localization accuracy vs. traditional clustering methods.
Tools:
PyTorch
PointPillars
PCL
LiDAR
Python
ROS
Overview
Participated in NASA's Space Robotics Challenge Phase 2, a ROS/Gazebo simulated autonomous lunar rover competition, as part of WVU's Team Mountaineers. Supported the perception team with image acquisition, processing pipelines, and sensor fusion for autonomous lunar surface operations. The team placed 6th in the final round.
★ KEY ACHIEVEMENTS
★
Team placed 6th nationally in NASA's Space Robotics Challenge Phase 2 final round.
★
Developed image acquisition and processing pipelines for autonomous lunar perception.
★
Contributed sensor fusion components supporting autonomous rover surface operations.
Tools:
ROS
Gazebo
OpenCV
Python
Sensor Fusion
MAY–AUG
2025
Santa Clara CA
2025
Santa Clara CA
Engineering Intern — Location Technology Team
Qualcomm
Developed FGO testing framework, integrated GNSS and motion sensor data, explored trade-offs between traditional and graph-based localization.
JAN 2021
–PRESENT
Morgantown WV
–PRESENT
Morgantown WV
Graduate Research Assistant
WVU Navigation Lab
Research and develop algorithms for cooperative multi-robot localization. Lead simulations and real-world experiments. Collaborate with industry and government partners.
JAN–DEC
2020
Morgantown WV
2020
Morgantown WV
Graduate Teaching Assistant
West Virginia University
Weekly lab sessions for 30 students. Graded assignments and provided office hour support.
DEC 2018
–OCT 2019
Nigeria
–OCT 2019
Nigeria
Assistant Lecturer — Control Systems
The Polytechnic Ibadan
Taught control theory to 47 students. Supervised final-year projects including smart waste disposal and obstacle-avoiding robot.
JAN–DEC
2018
Nigeria
2018
Nigeria
Engineering Intern
FanMilk Ng Ltd
Designed remote networking for Domino thermal coders — 15% increase in production uptime.